
Foretellix开放可测量场景描述语言 助力建立车辆验证和可测量安全性生态系统
初创公司Foretellix宣布开放M-SDL(可测量场景描述语言),使供应商与研发人员轻松描述所有场景和操作条件,确定未知危险边缘场景。
盖世汽车讯 据外国媒体报道,以色列初创公司Foretellix宣布向ADAS和无人驾驶汽车ECO开放M-SDL(Measurable Scenario Description Language,可测量场景描述语言),并向自动化及测量系统标准协会(ASAM)标准委员会贡献此种语言理念。对于当前验证车辆安全性的格式、语言、方法和指标的缺点,M-SDL是首款能解决以上问题的开放式语言。
正如许多业内专业技术人员所言,基于仿真和道路测试英里数、脱手次数,以及传统测试覆盖范围的安全方法和度量标准不充分、不可扩展、不易共享或重复使用。此外,由于无人驾驶汽车和交通的行为不可控,研发人员无法确定测试是否规划了预期的场景,或者是否评估了预期的测试覆盖范围。最终,这些技术都没提供足够的机制来识别未知的危险场景,也没有集合所有虚拟和物理测试平台的覆盖度量指标。
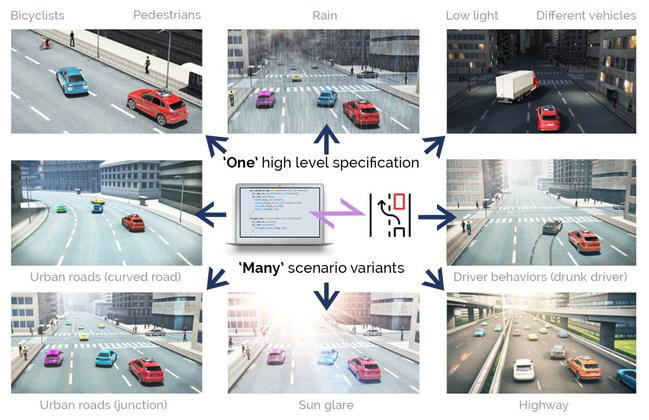
通过开放和贡献M-SDL,工具厂商、供应商与研发人员可使用通用的、人类可读的高级语言,简化捕捉、再次利用和共享的场景,并轻松描述所有场景和操作条件,确定未知危险边缘场景。此外,还能监测和测量无人驾驶汽车的功能范围,证实在测试和测试平台之外,无人驾驶汽车的安全性。




