
PID运算由P(份额)、I(积分)和D(微分)三项运算组成,PID运算公式如下:
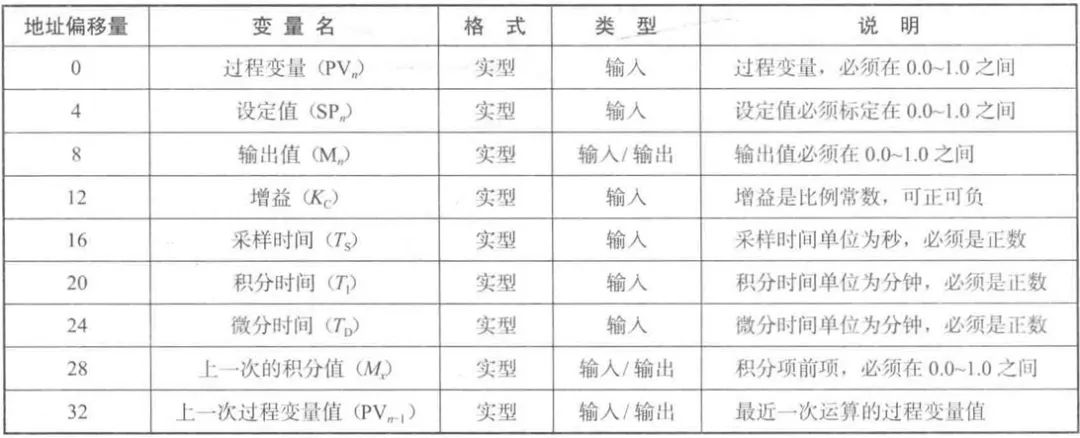
要进行PID运算,须先在PID操控回路参数表中设置运算公式中的变量值。PID操控回路参数表见表6-77。在表中,进程变量(PVn)相当于图6-59中的反应信号,设定值(SPn)
相当于图6-59中的给定信号,输出值(Mn)为PID运算成果值,相当于图 6-59中的操控
信号。假如将进程变量(PVn)值存放在VD200双字单元,那么设定值(SPn)、输出值(Mn)
PID运算由P(份额)、(积分)和D(微分)三项运算组成,能够精确的经过需求挑选其间的一项或两项运算。
①假如不需求积分运算,应在参数表中将积分时刻(Ti)设为无限大,这样(Ts/Ti)
值挨近0,虽没积分运算,但由于有上一次的积分值M,积分项的值也不为0.
③假如不需求份额运算,但需求积分或微分回路,能够把增益(Kc)设为0.0,体系
PID操控电路有两个输入量:设定值和进程变量。设定值通常是人为设定的参照值,
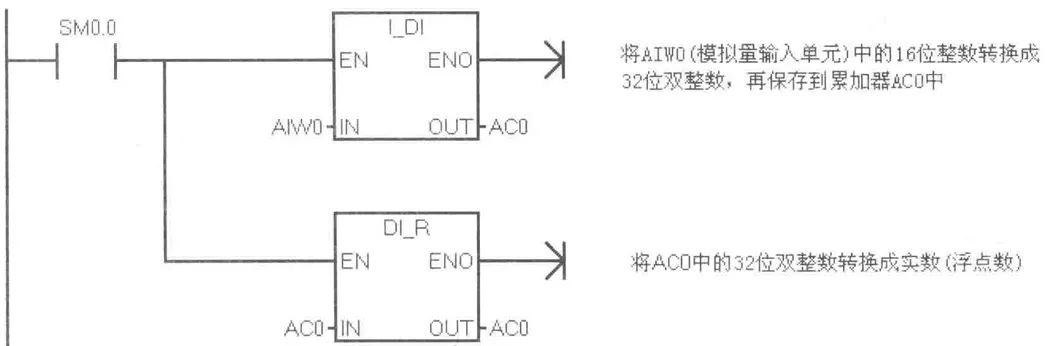
的设定值和进程变量值的巨细、规模和工程单位或许不一样,在履行PID指令进行PID运算前,有必要先把输入量转化成规范的浮点型数值。
①将输入量从16位整数值转化成32位实数(浮点数)。该转化程序如图6-60
双极性数值);偏移量取0.0(单极性数值)或0.5(双极性数值)。该转化程序如图6-61
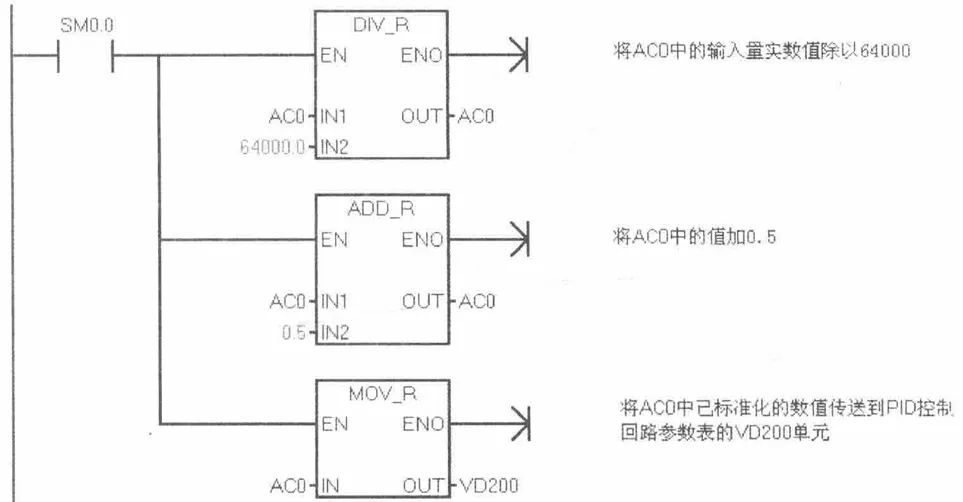
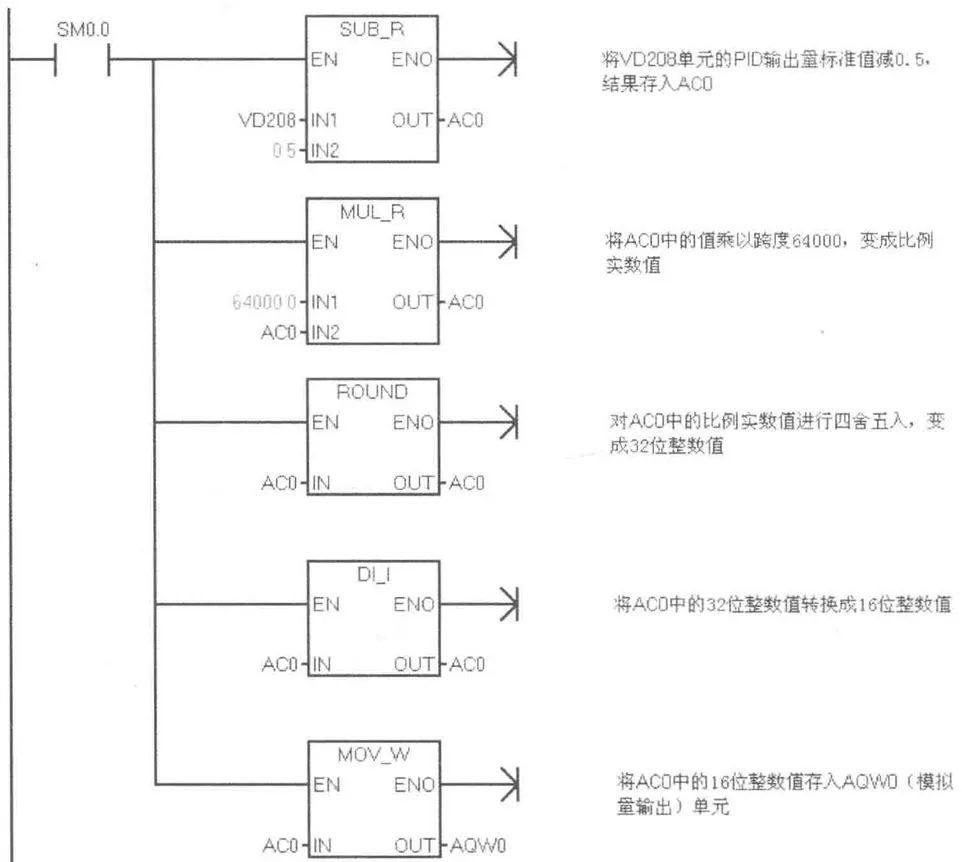
在PID运算前,需求将实践输入量转化成0.0~1.0之间的规范值,接着进行PID运算,PID运算后得到的输出量也是0.0~1.0之间的规范值,这样的数值无法直接驱动PID的操控目标,因而就需求将PID运算输出的0.0~1.0规范值按份额转化成16位整数,再送到模拟量输出单元,经过模拟量输出端子输出。
PID输出量的转化表达式为PID输出量整数值=(PID运算输出量规范值-偏移量)x跨度
在编写PID操控程序前,首先要确认PID操控回路参数表的内容。参数表中的给定值SPn增益值Kc、采样时刻Ts、积分时刻下、微分时刻Ti。需求在PID指令履行前输入,来自压力传感器的进程变量值需求在PID指令履行前转化成规范化数值并存入进程变量单元。参数表中的变量值要根据详细情况来确认,还要在实践操控时重复调试以
到达最佳操控作用。本例中的PID操控回路参数表的值见表6-78,由于期望水箱水压维持在满水压的70%,故将给定值SPn设为0.7,不需求微分运算,将微分时刻设为0。
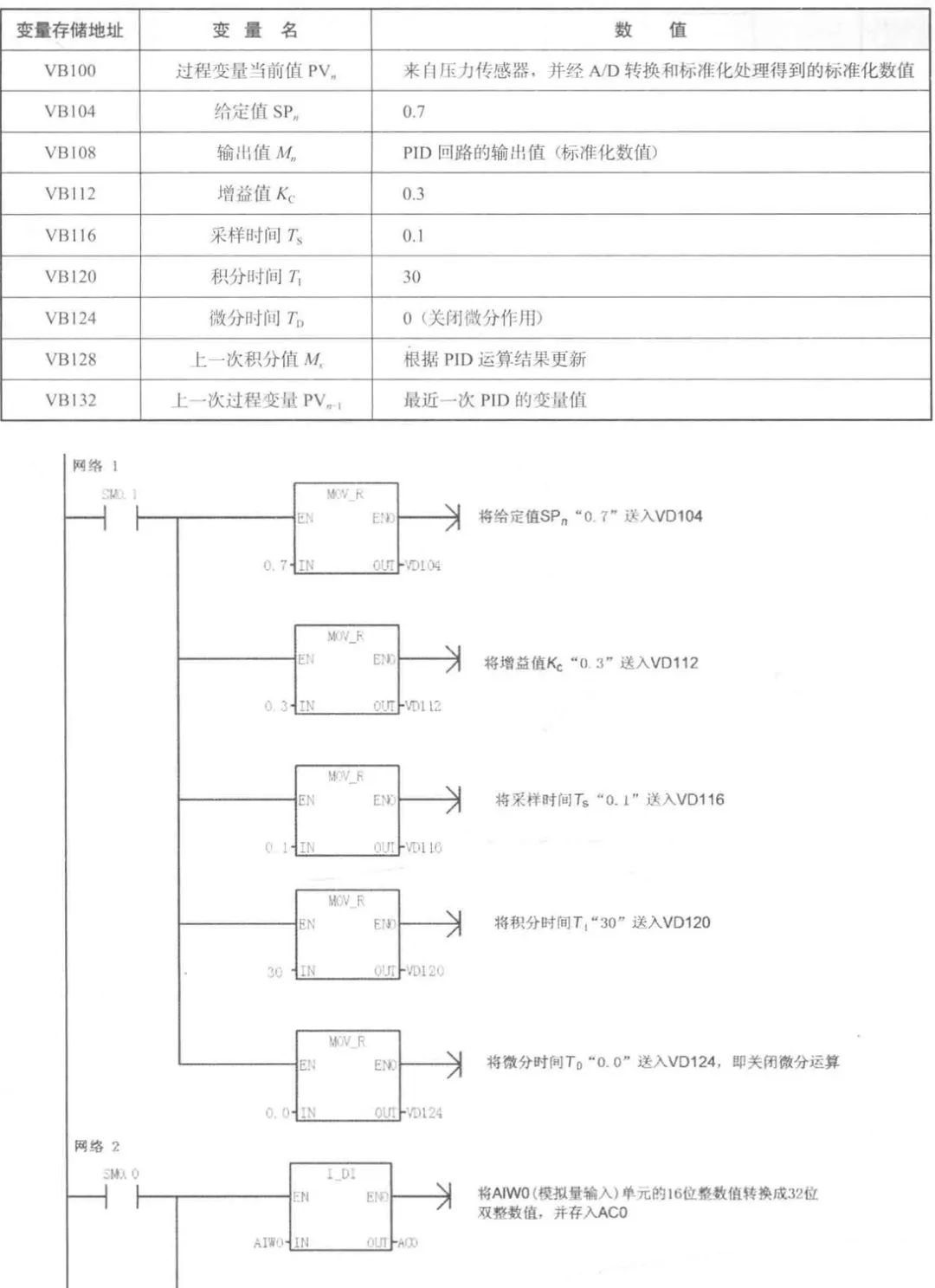
在程序中,网络1用于设置PID操控回路的参数表,包含设置给定值SPn增益值Kc采样时刻Ts、积分时刻Ti和微分时刻Td:网络2用于将模拟量输入AIW0单元中的整数值转化成0.0~1.0之间的规范化数值,再作为进程变量值PVn,存入参数表的VD100单元,AIW0单元中的整数值由压力传感器发生的模拟信号经PLC的A/D(模/数)转化模块转化而来;网络3用于发动体系从参数表取变量值进行PID运算,运算输出值M,存入参数表的VD108单元:网络4用于将VD108中的规范化输出值(0.0~1.0)按份额转化成相应的整数值(0~32000),再存入模拟量输出 AQW0单元,AQW0单元的整数经D/A(数/模)转化模块转化成模拟信号,去操控变频器作业频率,从而操控水泵电动机的转速来调理水压。
文章出处:【微信号:中泰PLC自动化教育,微信大众号:中泰PLC自动化教育】欢迎增加重视!文章转载请注明出处。
使用100例 /
Modbus库文件[Toolbox_V32-STEP 7-Micro WIN 32 Instruction Library]。
在食用菌培养工艺调理实验室中的使用规划 /
接入MQTT渠道 /
采用了新式的规划办法,信号板能够扩展通讯接口,数字量接口,模拟量接口,并且能合理的分配空间。
编程技巧 /
编程软元件介绍 /
操控又称份额积分微分操控,是一种闭环操控。下面以图1所示的恒压供水体系为例来阐明
(上) /
加密设置全面攻略 /
【《核算》阅览体会】+徜徉于历史人物事情中-跑跑核算实例感叹于前人的才智




