
伺服电机是机器人很重要的一个零件,伺服电机操控原理是依托脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的视点,以此来完成位移,因为,伺服电机自身具有宣布脉冲的功用,所以伺服电机每旋转一个视点,都会宣布对应数量的脉冲,这样,和伺服电机承受的脉冲形成了照应,或许叫闭环,如此一来,体系就会知道发了多少脉冲给伺服电机,一起又收了多少脉冲回来,这样,就能够很精确的操控电机的滚动,以此来完成精确的定位,因而伺服电机对工业机器人的精准度有很重要的影响。
这是带有脉冲发生器的伺服电机操控器的简略根本规划。它运用处于不安稳形式的CMOS IC 7555生成脉冲来驱动伺服电机。能适当地修正电路以取得满足长的脉冲。
伺服是具有输出轴的小型设备。经过向伺服发送编码信号,能够将该轴定位到特定的视点方位。只需输入线上存在编码信号,伺服体系将坚持轴的角方位。轴的角方位由施加到操控线的脉冲的保持的时刻确认。这称为脉冲编码调制。
伺服器一般每20毫秒(.02秒)需求脉冲。脉冲的长度将决议电机旋转多远。一般,1.5毫秒脉冲将使电动机旋转到90度方位。这称为中立方位。假如脉冲时刻短于1.5毫秒,则电动机会将轴旋转至挨近0度。假如脉冲善于1.5ms,则轴将更挨近180度。
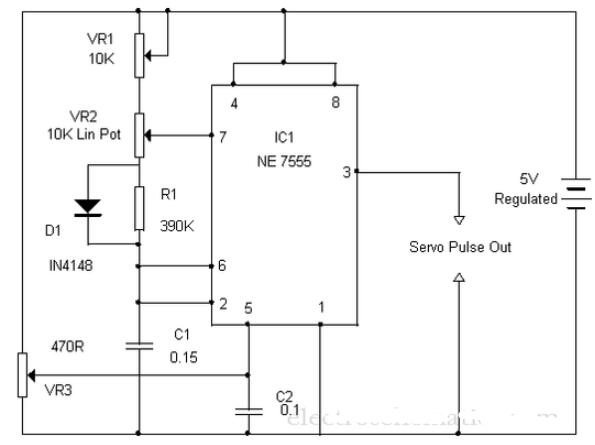
该电路规划为向伺服供给操控信号。IC1规划为非安稳多谐振荡器,能够为伺服操作供给脉冲。10KPot VR2,R1和电容器C1确认脉冲的高电平和低电平时刻。因为VR2是可变的,因而高电平时刻从2.07 mS到1.03 mS不等。低电平时刻为40.5毫秒。经过调整VR1,很简略取得精确的时序.VR3调整IC1的操控引脚5的1.6伏操控电压。
伺服电机是一种传统的电机。它是自动装置的履行元件。伺服电机的最大特点是可控。在有操控信号时,伺服电机就滚动,且转速巨细正比于操控电压的巨细。去掉操控电压后,伺服电机就立马中止滚动。伺服电机的使用甚广,简直一切的自动操控体系都要运用到。在家电产品中,例如录相机、激光唱机等都是必不可少的重要组成部分。
下图是一伺服电机的最简略的使用。电位器RV1由伺服电机带动。电机可选用电流不超越700mA,电压为12~24V的任一种伺服电机。图中RV1和RV2是接成惠斯登(Wheatstone)电桥。集成电路LM378是双路4瓦功率扩大器,也以桥接方法构成电机驱动差分扩大器。
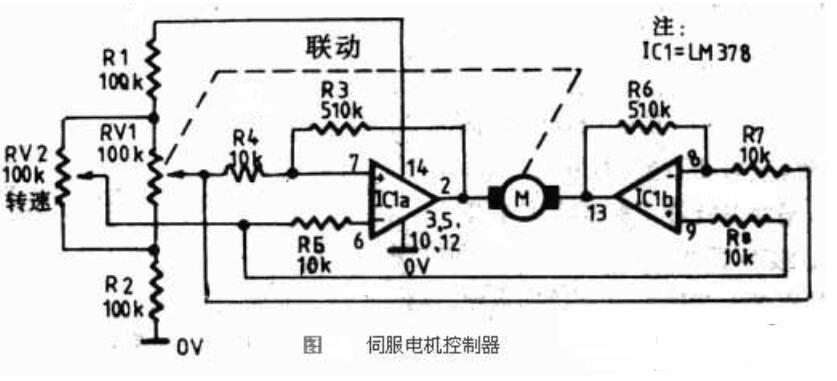
当RV2的恣意改变,都将损坏电桥的平衡,使RV1RV2之间发生一差分电压,而且加以扩大后送至电机。电机将滚动,拖动电位器RV1到新的方位,使电桥从头到达新的平衡。所以说,RV1是盯梢了RV2的运动。




