
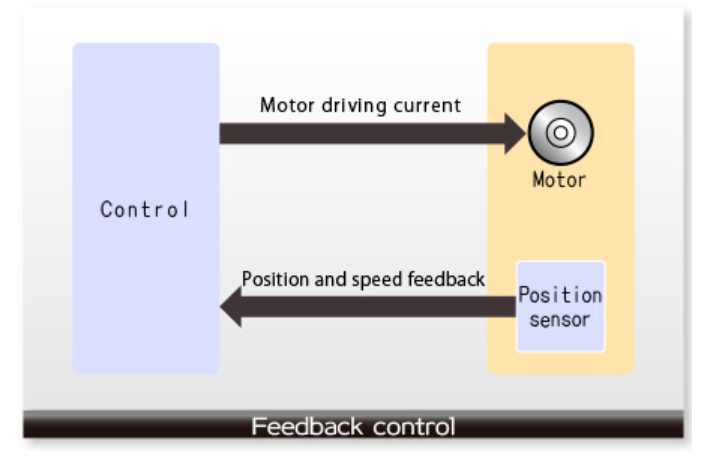
是一种把电能转换成旋转运动的装置。为了正确地旋转电机,一定得执行反馈控制。反馈控制将监控电机的旋转方式,并根据结果确定提供给电机的电流量。换句话说,通过以下步骤能保持适当的转速:1、检测电机转速。2、决定应该增加还是降低电机的转速。3、根据决定,增加或减少提供给电机的电流。
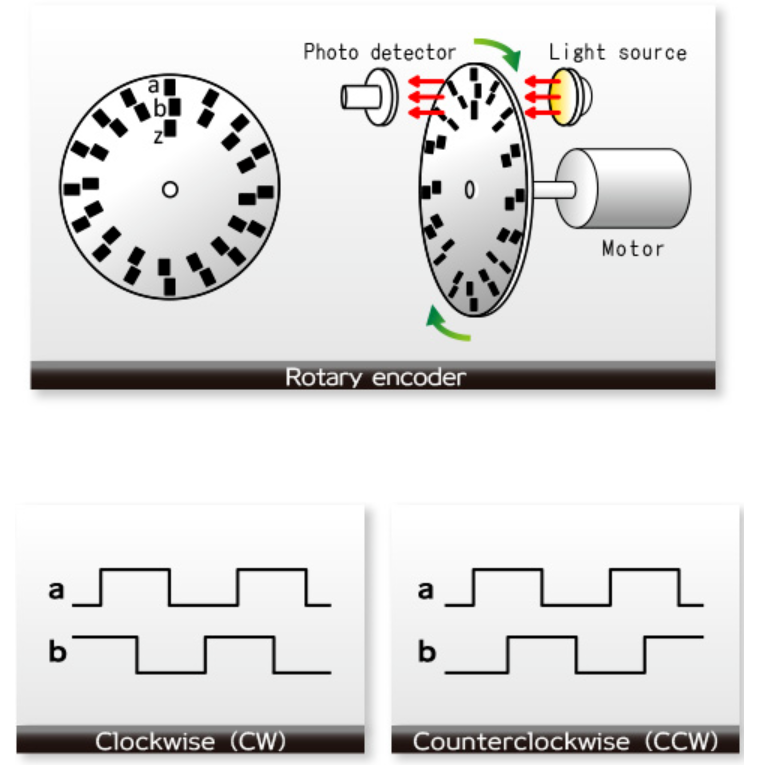
为了执行反馈控制,需要获取转子上的旋转信息。获取信息的其中一个设备便是旋转编码器。旋转编码器的说明如下。
转子上有许多开孔的圆盘。一个光电探测器放在圆盘的一边,一个光源放在另一边。圆盘与转子一起旋转。当圆盘的孔位于光源前面时,光到达光检测器,于是检测到圆盘的孔。如果转子转动缓慢,孔移动的周期将变长。如果转子转动很快,孔的检验测试周期就会变短。从而能够检测转子的转速。另外,在圆盘上多开一个孔,用它来决定圆盘的起点。这样,即使孔一个接一个地出现,也可以从起点开始计算孔的数量。用这种办法能够检测转子的当前旋转位置。但是也会丢失转换的重要信息。也就是说,无法获取转子是顺时针旋转还是逆时针旋转的信息。所以我们再做一行孔,使每个新孔都稍微偏离原来的孔。这样,根据两排孔的相对位置关系能判断转子是顺时针(CW)旋转还是逆时针(CCW)旋转。
伺服控制用于有两个对象的情况,即一个“指导员”和一个“操作员”,“指导员”发出命令,“操作员”执行命令。使“操作者”严格按顺序操作的方法便是伺服控制。例如,当老师对学生说“走”、“停”或“右转”时,学生会按照指示移动。这就是伺服控制。
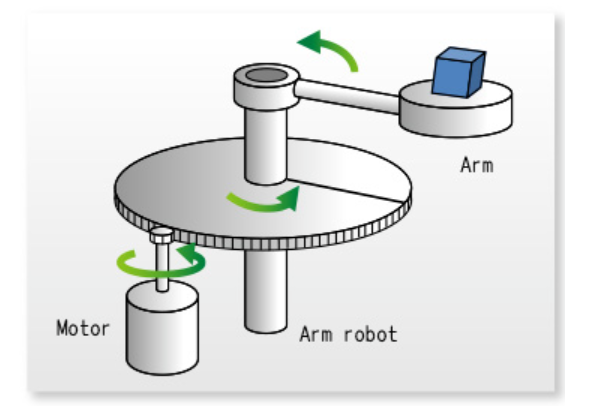
让我们看一下电机的伺服控制:如何移动手臂机器人。例如,假设一个手臂固定在大齿轮上,齿轮与安装在电机上的小齿轮一起旋转。电机的旋转将按照旋转次数的比例移动手臂。现在,假设电机必须旋转100次才能使手臂旋转一次。所以为了将手臂旋转90度,电机需要旋转25次。即伺服控制指令为“旋转25次”。如果电机从停止状态立即开始移动,并且仅转动25次,则手臂可以旋转90度。
但是经验告诉我们,现实并不是那么简单。当用手臂旋转齿轮时,电机需要一段时间才能从停止状态开始移动。另外,在暂停电机时,即使发出停止指令,电机仍会滑行一段短时间。所以即使给电机一个旋转25次的指令,也不能确定电机的实际旋转次数是25次。
在电机伺服控制中,基本配置是控制电机的旋转次数和转速。当手臂开始移动时,电机缓慢转动,速度逐渐增加。在达到最大指令速度后,速度保持不变,并且旋转逐渐变迟缓,并以适当的定时进行。执行控制使其在末端停止。但是应控制电机在该运动中的旋转次数,以匹配要求的旋转次数。
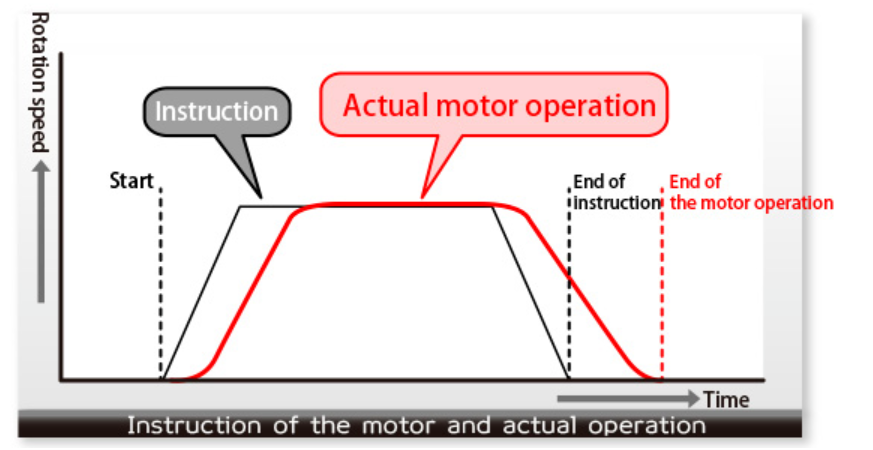
旋转次数是指令梯形的面积。需要控制实际电机运行的面积,以匹配指令的面积。
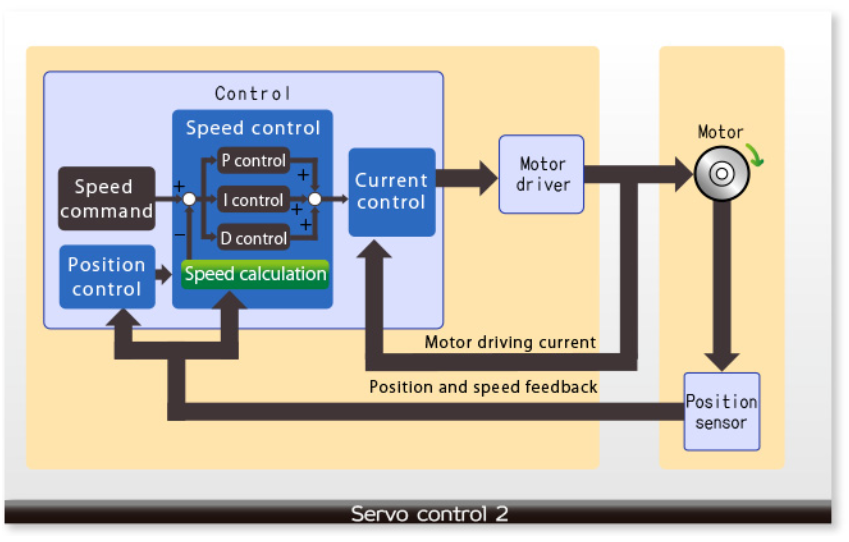
PID控制将并行执行每个控制:P控制(比例控制)、I控制(积分控制)和D控制(微分控制)。
由于每个控制都具有有用的作用,因此这些控制的组合能轻松地处理各种变化。比例(P)控制是简单的放大:如果当前值小于设定值,则该值将以正方向来控制,如果当前值较大,则该值将以负方向来控制。在许多情况下,使用比例(P)控制不能够达到目标值,因此我们增加了积分(I)控制。积分(I)控制将根据当前状态决定与总差异(积分值)成比例的电机驱动电流。换言之,它是校正累积变化的控制。
相反,微分(D)控制是一种处理意外状态的控制。变化程度越大,微分(D)控制使得状态恢复原位的力就越大。这对于以下情况而言是一种有效的控制:猛地增加/移除过大的负载,电压变得不稳定或突然降低,当外部干扰影响时,需要将状态恢复到原来的位置。
近年来,微控制器被用于伺服控制。微控制器通过软件实现伺服控制。微控制器通常用作系统控制器,不仅控制伺服控制,还能控制各种各样的东西。伺服控制与伺服控制以外的控制异步执行。此外,伺服控制需要定期执行。如果同时发生,微控制器必须第一先考虑伺服控制或者是作为系统控制器的控制。但是接收到低优先级的那个微控制器不能延迟到所需的时间。微控制器控制的系统功能越高或者控制精度越高,此现状就越频繁发生。为了尽最大可能避免这种情况,需要提高微控制器的处理速度。
一般来说,它能够最终靠加快系统时钟来实现,但这会增加功耗,由此产生噪音和热量。此外,有时会因为微控制器的操作限制,您可能没办法加速。未解决这一问题,我们可采用几种方法降低微控制器的处理负载:采用微控制器协处理器进行伺服控制,将伺服控制和系统控制的硬件分开。可编程伺服/顺序控制器(PSC)可以与系统控制异步启动,并执行伺服控制过程。它是一个单一IC,但伺服控制和系统控制由硬件单独处理。系统时钟能保持在低频率。
ROHM开发出安装可靠性高的车载Nch MOSFET,非常适用于汽车车门、座椅等所用的各种电机以及LED前照灯等应用!
尼得科开发的电机产品被太阳诱电株式会社推出的充满一次电可骑行1000km的装有再生制动系统的电动助力自行车采用
上一篇:第三届GMIF2024创新峰会最新议程发布!四大亮点待解锁,更精彩现场揭晓!




