
伺服可以实现位置,速度,扭矩精确控制,尤其在位置控制模式下使用最多。伺服的使用在当前的工业环境下有着广泛的应用,小到家庭门窗窗帘,大到航空航天。学会了伺服不仅可以混口饭吃,而且伺服相关的衍生行业你也都可以做。
伺服一般由整流电路,滤波电路,PWM调节电路,电压电流采集电路,模拟量输入输出电路,位置反馈电路,力矩反馈等电路组成,具体结构如下图所示:
力矩模式下源型接线(控制)端子相关接线端子连接线缆插头的背部方向的视图,如下图中红框所示
通过较高的输入电压来调节LED中的电流,最有效的方法是使用一个同步降压稳压器。这可以通过一个集成场效应晶体管 (FET),峰值电流模式控制器轻松实现。在峰值电流模式控制中,COMP电压(经常被称作误差信号),直接控制峰值电感器电流。这使得电感器表现为一个电流源,其原因是他的阻抗变化对于电流幅值的影响很小。使用一个诸如TPS54218的峰值电流模式控制器的主要优势是这种器件几乎消除了由控制环路增益造成的电感器频率响应。 下面的方框图详细展示了一个同步降压转换器,其中的LED和感测电阻器与电感器串联。在这个应用中,电感器的全纹波电流流经LED。如果需要较少的纹波电流,只需增加电感值或将一个电容器与LED并联即可。无论输出电容器存在
匣式自由放线mm主动放线架,张力装置储线器及成圈机组成。 线缆从主动放线架放出后,经过张力装置储线器绕到成圈机的膨胀芯轴上去。 当达到了设定长度时,成圈机即自动停车。将下托盘降低,并将移动台上的包装纸推到圈线下面,圈线自动落入纸匣中。 移动台退出后,下托盘升至工作位置,开始下一圈的绕线。 整个流程摆杆保证交叉卷绕位置及形状正确。卷绕及放线张力由储线器张力臂控制恒定,并保证主动放线架同步。如图: 电缆绕线.工艺要求: a. 摆杆与成圈机收线轮同步,电缆密集度要均匀; b.摆杆每30圈为一个周期,到达30圈重新回到起点绕制第二圈,预留中间出线
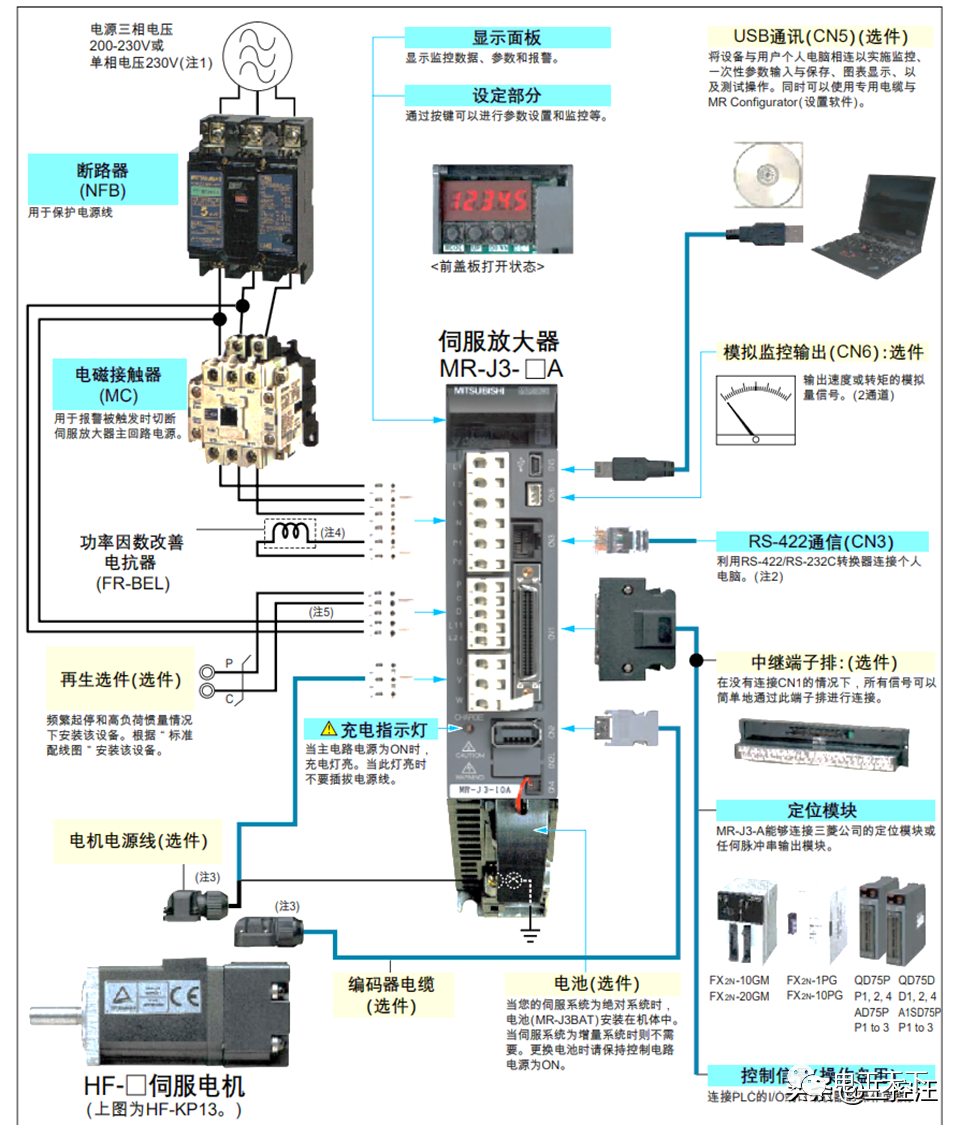
伺服驱动器(servo drives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。 伺服驱动器被应用于工业机器人及数控加工中心等自动化设备中。 在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。 M/T测速法虽然具有一定的测量精度和较宽的测
变频器的概念和工作原理 变频器是一种电力调节设备,它可以将电源(通常为交流电)的频率和电压转换为可变的输出信号,从而实现驱动电动机调节转速的目的。变频器的主要作用是通过调节电机的输出频率和电压来实现电机转速的控制和调节。变频器还可以实现多种保护功能,如过载保护、短路保护、过热保护等。 变频器的工作原理是将手机充电器的直流电变成波形电,这样电机就可以使用变频器中的控制系统来调节频率和电压,从而实现电机的控制和调节。变频器通过数字化调制技术,实现了快速高效的电源逆变和电机驱动控制,使其具有高效、节能、精准控制及结构紧凑等优点。同时,变频器还可以通过反馈控制系统,进行自动调节和故障检测,确保电机的安全和可靠性。 变频器的控制方式
投资要点 工业机器人本体是运动控制基础上的一次集成,机器人生产线是二次集成。运动控制系统主要由运动控制器、执行机构(如伺服系统)和传动机构(齿型带或减速机)等构成,机器人技术的基础是运动控制。 运动控制技术经历了从直流到交流,从开环到闭环,从模拟到数字,到基于PC的伺服控制网络系统。 伺服系统受益装备升级,需求持续增长,下游结构分化加剧。2012年我国金属切屑机床数控化率26%,与发达国家60%-70%的水平相去甚远,装备升级空间广阔,2014年伺服系统总规模61亿,判断未来增速将达5%-10%。但下游需求增速将结构分化,机器人、电子设备制造等新兴产业对伺服需求增速将达15%-20%,远高于传统机械。
PWM开关稳压或稳流 电源 基本工作原理就是在输入电压变化、内部参数变化、外接负载变化的情况下,控制电路通过被控制信号与基准信号的差值进行闭环反馈,调节主电路开关器件的导通脉冲宽度,使得 开关电源 的输出电压或电流等被控制信号稳定。 PWM的开关频率一般为恒定,控制取样信号有:输出电压、输入电压、输出电流、输出电感电压、开关器件峰值电流。由这些信号可以构成单环、双环或多环反馈系统,实现稳压、稳流及恒定功率的目的,同时可以实现一些附带的过流保护、抗偏磁、均流等功能。对于定频调宽的PWM闭环反馈控制系统,主要有五种PWM反馈控制模式。下面以VDMOS开关器件构成的稳压正激型降压斩波器为例说明五种PWM反馈控制模式的发展过程、基本工
1 引 言 直流伺服驱动器凭借其优异的驱动性能,在工业、医疗、国防等领域有着广泛应用。典型的直流伺服驱动器的结构如图1-1所示。整个系统是由电流环、速度环和位置环构成的多环控制系统。传统的伺服驱动器使用运放为核心的模拟电路构成,其有结构复杂、参数调整不易和系统性能易受环境影响等缺点。随着微处理器技术、模拟数字接口技术和功率半导体技术的长足发展,现代的直流伺服驱动器普遍采用由微处理器为核心的数字控制系统。以微处理器为核心的伺服驱动器不但可以方便实现以前用模拟电路无法实现的控制算法,并且有着结构简单、参数调整方便、系统性能对环境参数不敏感等优点。同时,数字控制系统还可以充分利用成熟的网络连接技术,实现多机并行运行。
电源框图 ADC单独供电 为了提高转换的精确度,ADC使用一个独立的电源供电,过滤和屏蔽来自印刷电路板上的毛刺干扰。 ADC的电源引脚为VDDA 独立的电源地VSSA 电池备份区域 当VDD断电时,可以保存备份寄存器的内容和维持RTC的功能。 VBAT为RTC、LSE(低速外部时钟)振荡器、备份寄存器和PC13至PC15供电。 当备份区域由VDD(内部模拟开关连到VDD)供电时,下述功能可用: PC14和PC15可以用于GPIO或LSE引脚 PC13可以作为通用I/O口、TAMPER引脚、RTC校准时钟、RTC闹钟或秒输出 当后备区域由VBAT供电时(VDD消失后模拟开关连到VBAT),可以使用下述功能:
) /
与S7-1200 PLC应用技术教程 (郑海春)
【电路】MC33035原理框图及三相全波无刷直流电动机开环速度控制接线图
有奖直播 是德科技 InfiniiMax4.0系列高带宽示波器探头新品发布
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!跟帖赢好礼~
ADI世健工业嘉年华——深度体验:ADI伺服电机控制方案
Cadence 推出新版 Palladium Z2 应用,率先支持四态硬件仿真和混合信号建模技术加速 SoC 验证
内容提要• 四态硬件仿真应用可加速需要 X 态传播的仿真任务• 实数建模应用可加速混合信号设计软件仿真• 动态功耗分析应用可将复杂 ...
1946年,第一台计算机ENIAC诞生,冯诺伊曼据此提出了经典的冯诺伊曼架构,自此,计算机的存储与处理技术在八十年间得到不断演进,现代 ...
Cooper™ 开发者平台为工业应用、AIoT、智能视频分析和前端 AI 计算应用提供高能效解决方案。美国加利福尼亚州圣克拉拉市,2024年1月10 ...
“应用创新、打造新生态”,ICDIA 2024启航!各大研究机构认为全球半导体市场在2023年到达周期性低点后,今年将整体出现复苏的趋势。Gartn ...
随着生活水平的提高,人们对电子产品的要求也越来越高,很多电子产品都用上了显示屏,像家电、汽车、医疗等很多产品都配有显示屏,而且这些 ...

手机版站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口




