
,可是不要紧,就让小编为我们处理这一难题吧,快来学习一下吧,很涨姿态的哦~~~
伺服电机(servo motor ),又称履行电机,是指在伺服系统中操控机械元件作业的发动机,是一种补助马达直接变速装置。它可以使操控速度、方位精度十分精确,可以将电压信号转化为转矩和转速以驱动操控目标。伺服电机可大致分为直流伺服电机和沟通伺服电机。它可以适用于对本钱灵敏的一般工业和民用场合。

沟通伺服电机也是由定子和转子构成。它的定子的结构基本上与电容分相式单相异步电动机类似,其定子上装有两个方位互差90°的绕组,一个是励磁绕组Rf,它一直接在沟通电压Uf上;另一个是操控绕组L,联接操控信号电压Uc。所以沟通伺服电动机又称两个伺服电动机。
沟通伺服电动机的转子一般做成鼠笼式,但为了使伺服电动机具有较宽的调速规模、线性的机械特性,无“自转”现象和快速呼应的功能,它与一般电动机比较,应具有转子电阻大和滚动惯量小这两个特色。
沟通伺服电机的作业原理与两相异步电机类似 。可是因为它在数字操控机床中作为履行元件,将沟通电信号转换为轴上的角位移或角速度,所以要求转子速度的快慢可以反映操控信号的相位,无操控信号时它不滚动。
因为定子上的两个绕组在空间相差90°电视点,如果在两相绕组上加以幅值持平、相位差90°电视点的对称电压,则在电机的气隙中发生圆形的旋转磁场。若两个电压的幅值不等或相位不为90°电视点,则发生的磁场将是一个椭圆形旋转磁场。加在操控绕组上的信号不同,发生的磁场椭圆度也不同。
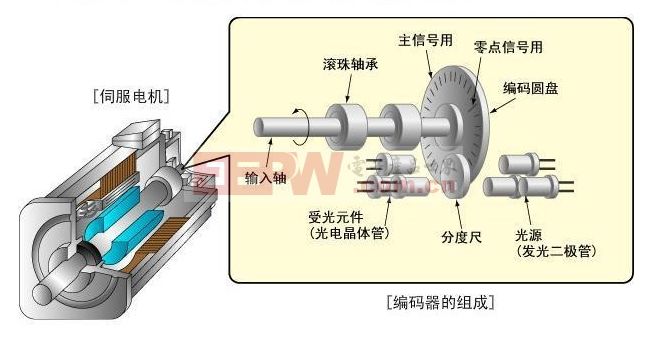
伺服电机内部的转子是永磁铁,驱动器操控的U/V/W三相电构成电磁场,转子在此磁场的效果下滚动,一起电机自带的编码器反应信号给驱动器,驱动器依据反应值与目标值作比较,调整转子滚动的视点。




